ポイントクラウドとは
ポイントクラウドは点群とも呼ばれ、3次元座標の集合です。 SkEyesBoxによって作られるポイントクラウドは、GPS座標と直接比較可能な絶対位置による3次元座標だけではなく、その点を計測した時刻のSkEyesBox自体の位置及び姿勢、レーザーの反射強度、レーザー距離計の出力距離、ミラーの角度、タイムスタンプなどの情報を持ちます。オプションで色データを持たせることも可能です。 これらのデータを有効に使うと様々な情報が得られます。
計測データ例(画像クリックで拡大できます)
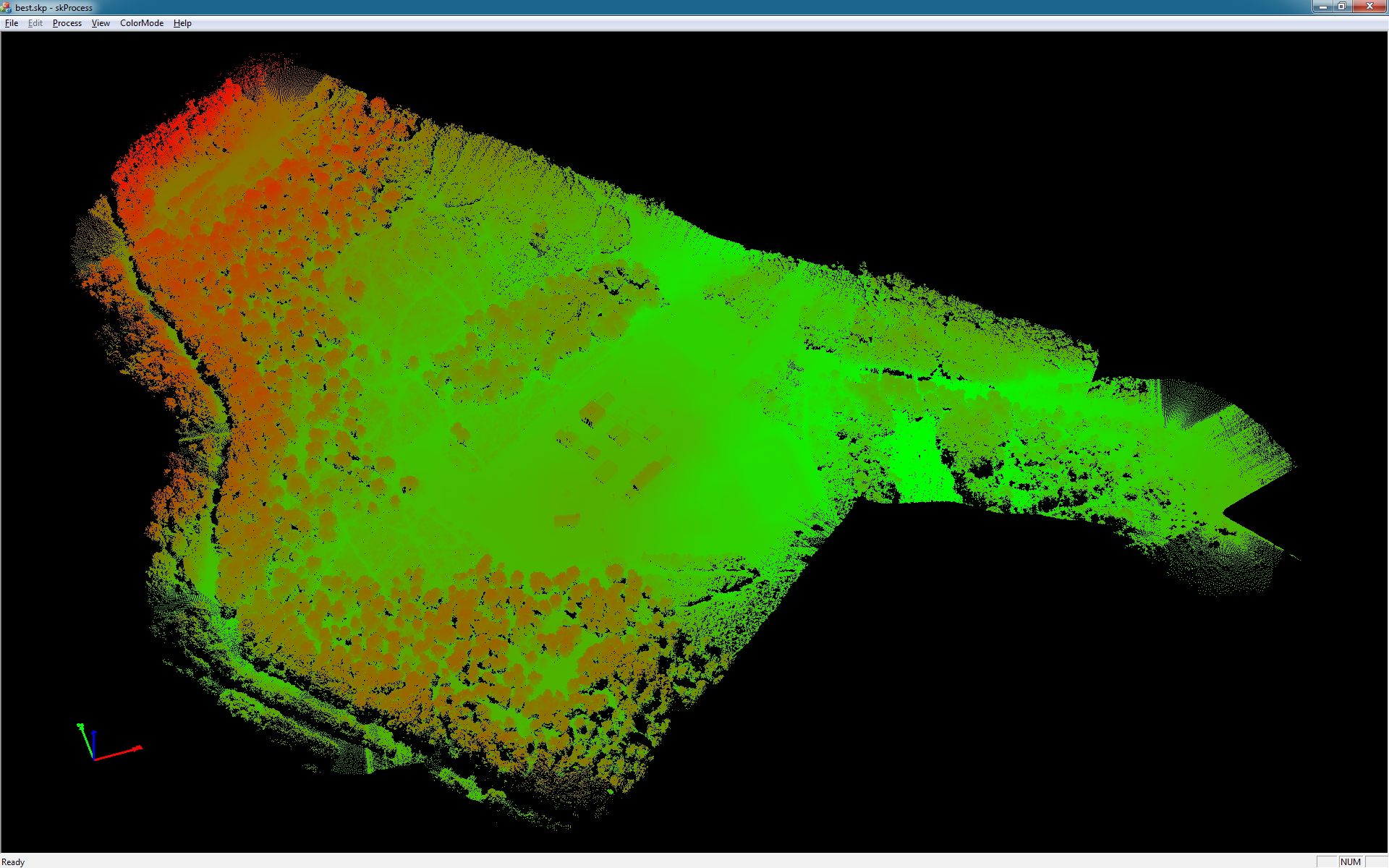
高度による着色
高い所が赤、低い所が緑に着色されています。
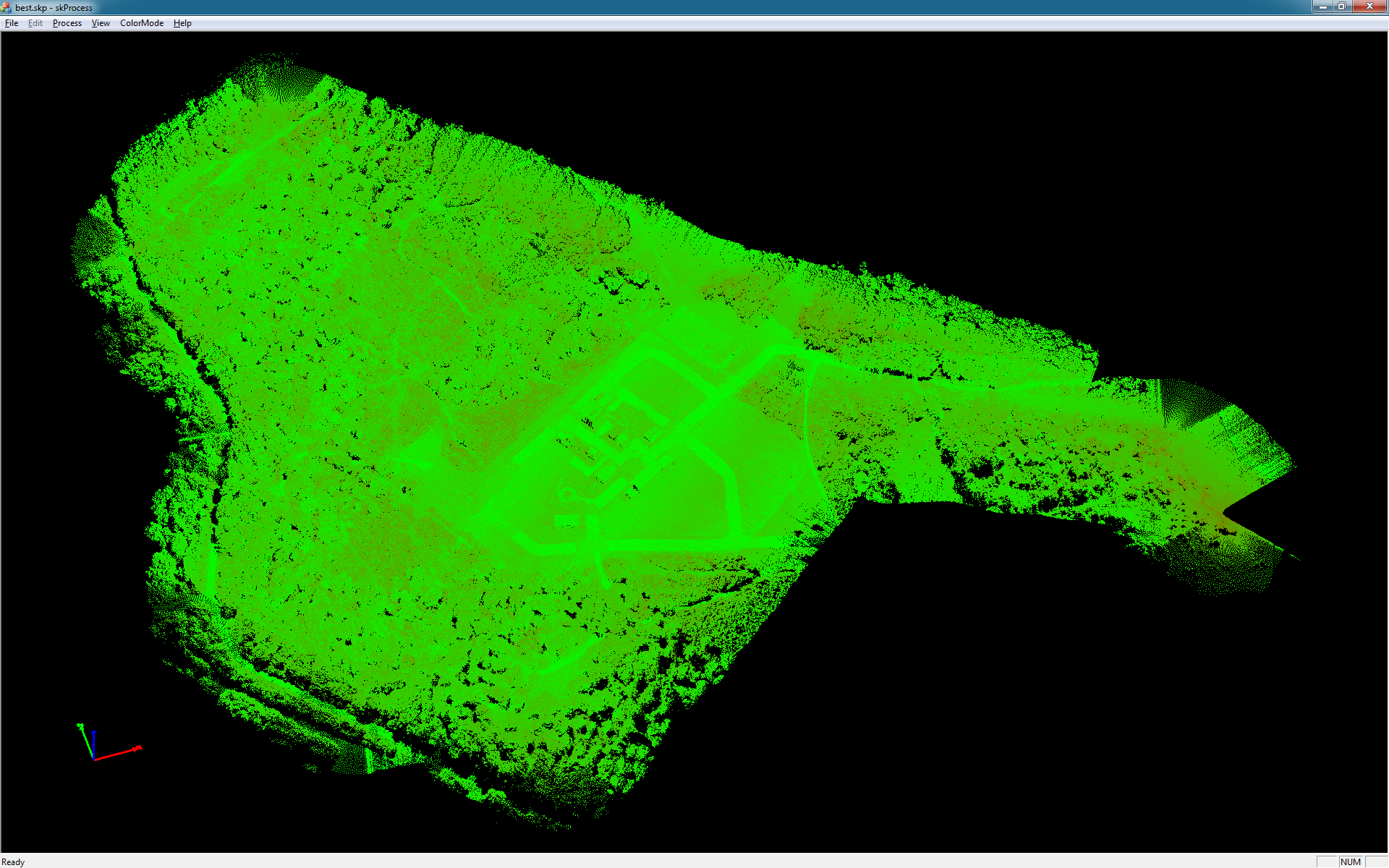
反射強度による着色
反射強度が高い点が赤、反射強度が低い点が緑に着色されています。例えば、道路とそうでない場所の差がわかります。
カメラ画像との統合
カラライザを使用した場合、ポイントが色情報を持ちます。

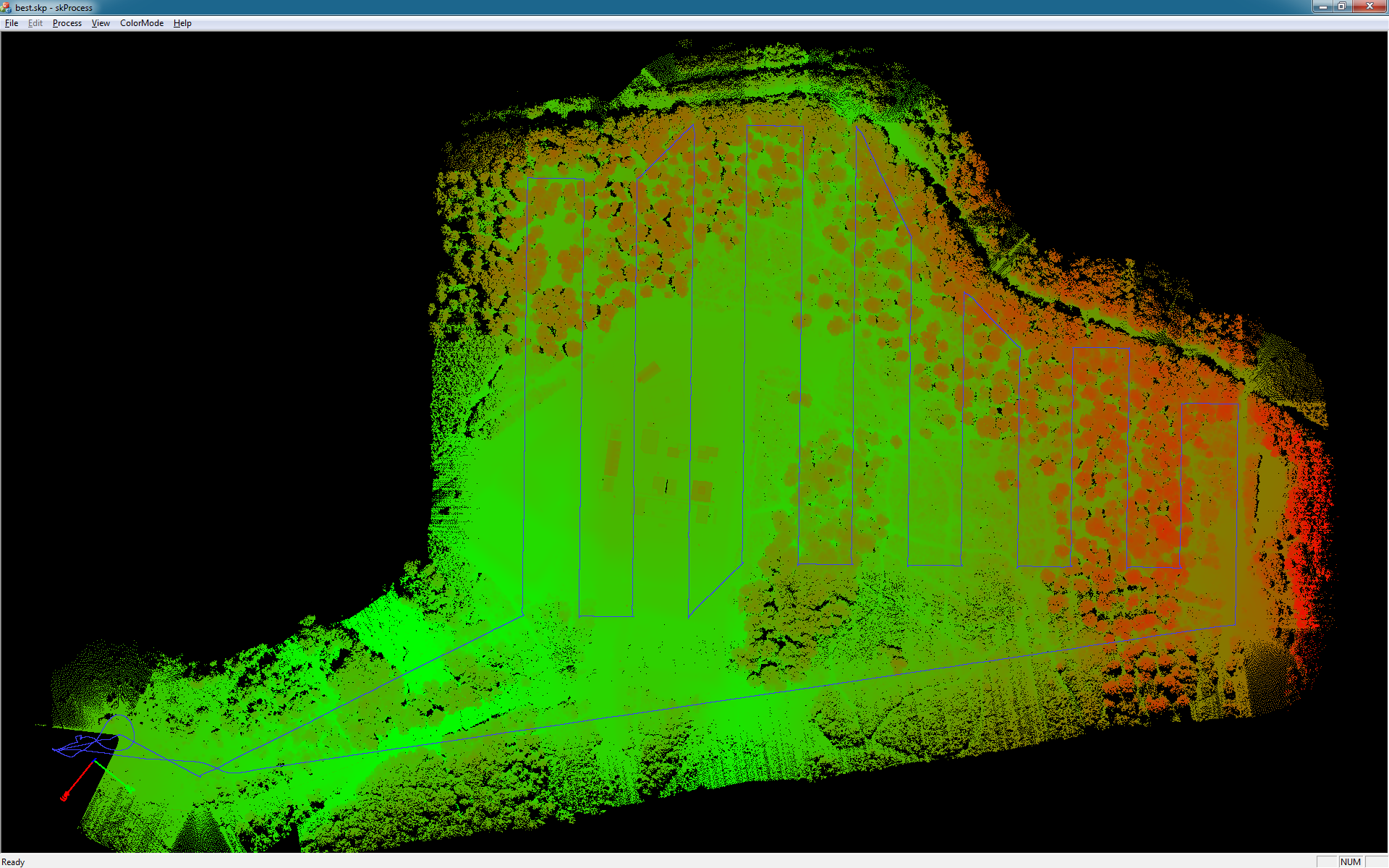
飛行軌跡
青い線が自律航行ソフトウェアによる飛行軌跡です。対地高度約50m,直線間の距離も約50mです。リアルタイムに得られる計測データにより、対地高度が約50mに保たれるように自動制御されています。水平位置は予め設定したウェイポイントを巡回しています。この計測フライトは計測開始/終了地点までの往復を含めて約35分間でした。
パルスモード
SkEyesBoxはレーザーの計測モードとして、ファーストパルス(最初の反射波を採用)、ラストパルス(最後の反射波を採用)、これらを交互に切り替えるトグルモードを選択できます。ラストパルスを利用すると、樹木の上空から計測した場合にも、ある程度の地面の情報を得ることが可能となります。
